Summary
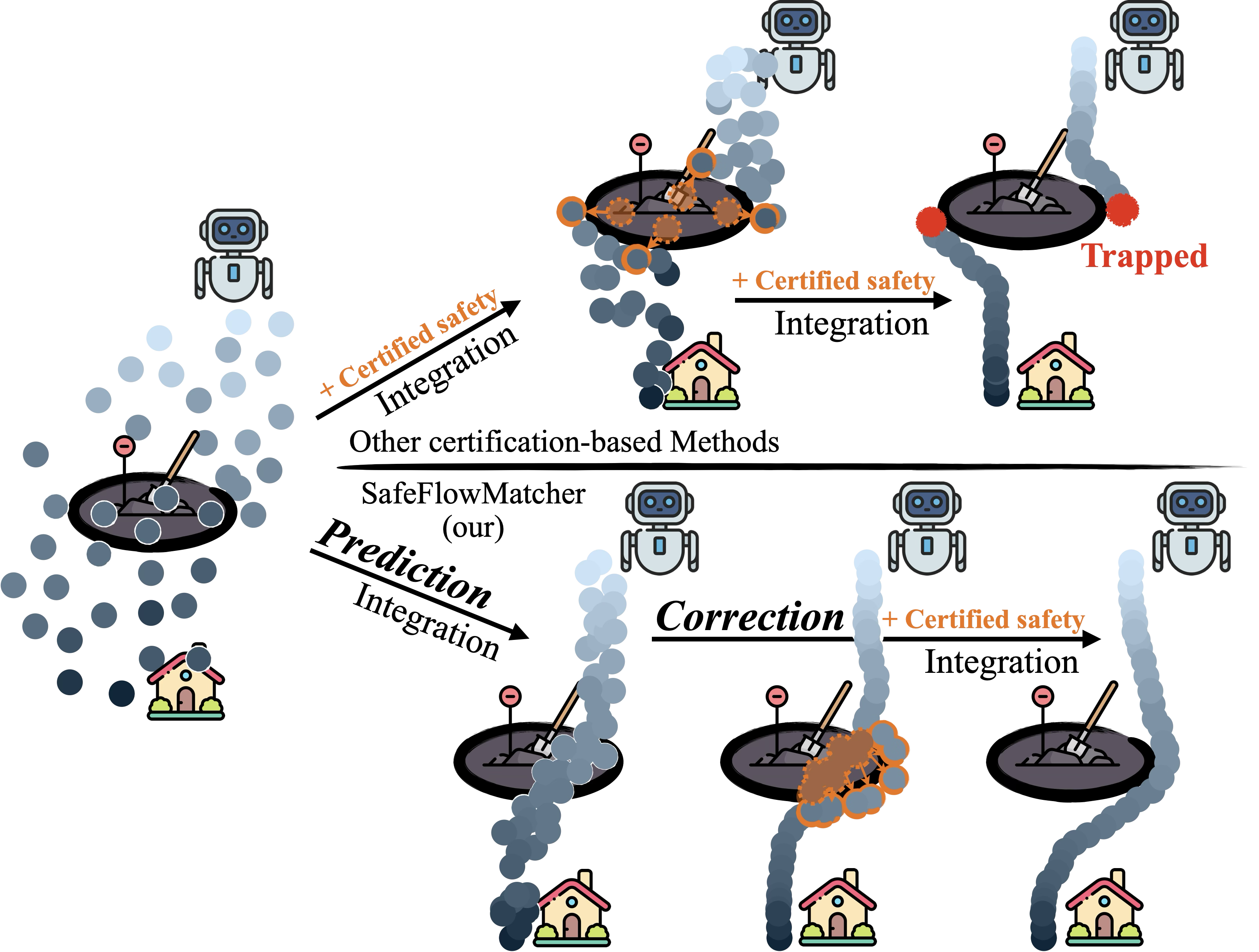
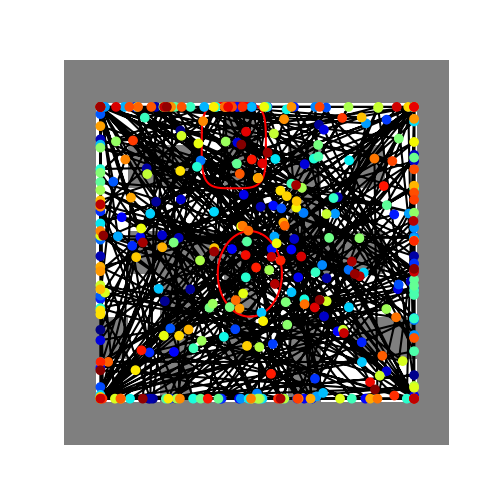
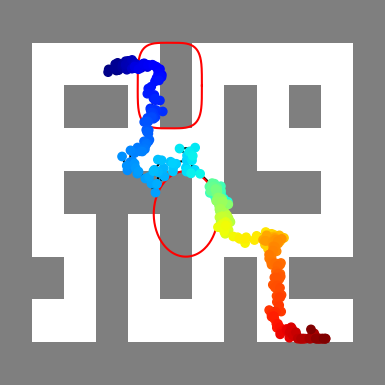
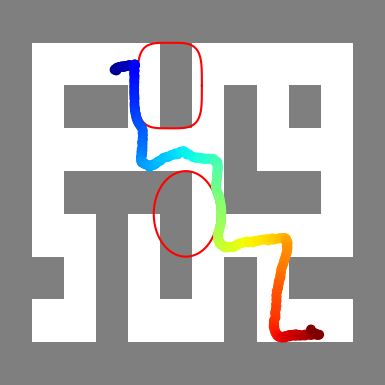
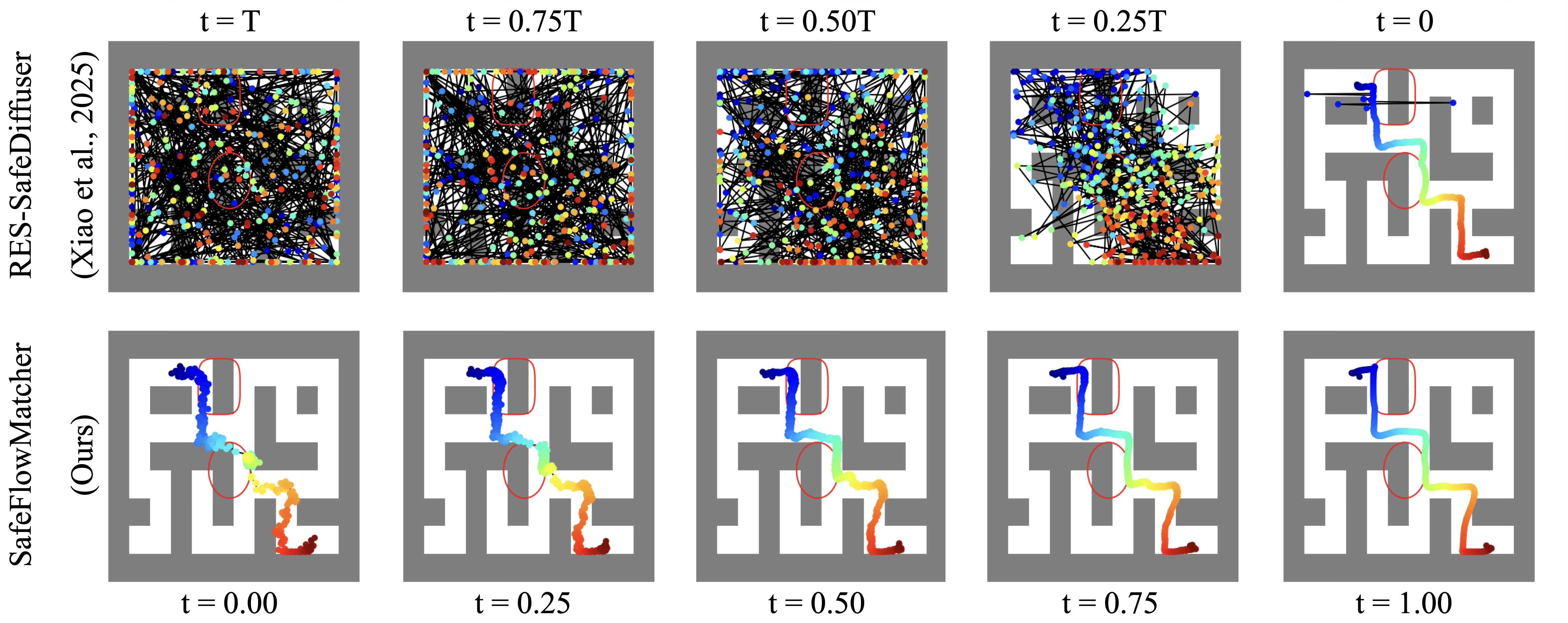
Overview of SafeFlowMatcher versus existing certification-based methods. Directly constraining intermediate samples during generation (top) can cause paths to be distorted or trapped, whereas SafeFlowMatcher (bottom) decouples generation and certification via a prediction–correction integrator, producing a complete and certified-safe path.
Problem. Flow matching (FM) planners generate high-quality paths in very few ODE steps, but provide no formal safety guarantees and can produce incomplete paths near constraints.
Method. SafeFlowMatcher couples FM with control barrier functions (CBFs) via a two-phase prediction–correction integrator:
(i) Predict — run the learned FM one or a few steps to get a candidate path;
(ii) Correct — refine the path using a vanishing time-scaled vector field and a CBF quadratic program that applies the minimum perturbation needed to restore safety.
Key insight. Safety is enforced only on the executed path, not on every intermediate latent sample — eliminating distributional drift and local trap problems that affect prior methods.
Results. SafeFlowMatcher produces faster, smoother, and safer paths than diffusion- and FM-based baselines across maze navigation, locomotion, and robot manipulation tasks. We also prove a barrier certificate guaranteeing forward invariance of a robust safe set and finite-time convergence to safety.