Real-time planning among many uncertain, dynamic obstacles is challenging because predicting every agent with high fidelity is both unnecessary and computationally expensive. We present Heterogeneous Predictor-based Risk-Aware Planning (H-PRAP), a framework that allocates prediction effort to where it matters. H-PRAP introduces the Probability-based Collision Risk Index (P-CRI), a closed-form, horizon-level collision index obtained by calibrating a Gaussian surrogate with conformal prediction. P-CRI drives a router that assigns high-risk obstacles to accurate but expensive predictors and low-risk obstacles to lightweight predictors, while preserving distribution-free coverage across heterogeneous predictors through conformal prediction. The selected predictions and their conformal radii are embedded in a chance-constrained model predictive control (MPC) problem, yielding receding-horizon policies with explicit safety margins. We analyze the safety-efficiency trade-off under a prediction compute budget: allocating more to low-fidelity predictions reduces residual risk from dropped obstacles, but at the same time induces larger conformal radii, degrades trajectory efficiency, and shrinks MPC feasibility. Extensive numerical simulations in dense, uncertain environments validate that H-PRAP attains the best balance between trajectory success rate (i.e., no collisions) and time to reach the goal (i.e., trajectory efficiency) compared to single-prediction architectures.
 In Proceedings of the International Conference on Neuro-symbolic Systems (NeuS), Jun. 2026. (Oral).
In Proceedings of the International Conference on Neuro-symbolic Systems (NeuS), Jun. 2026. (Oral).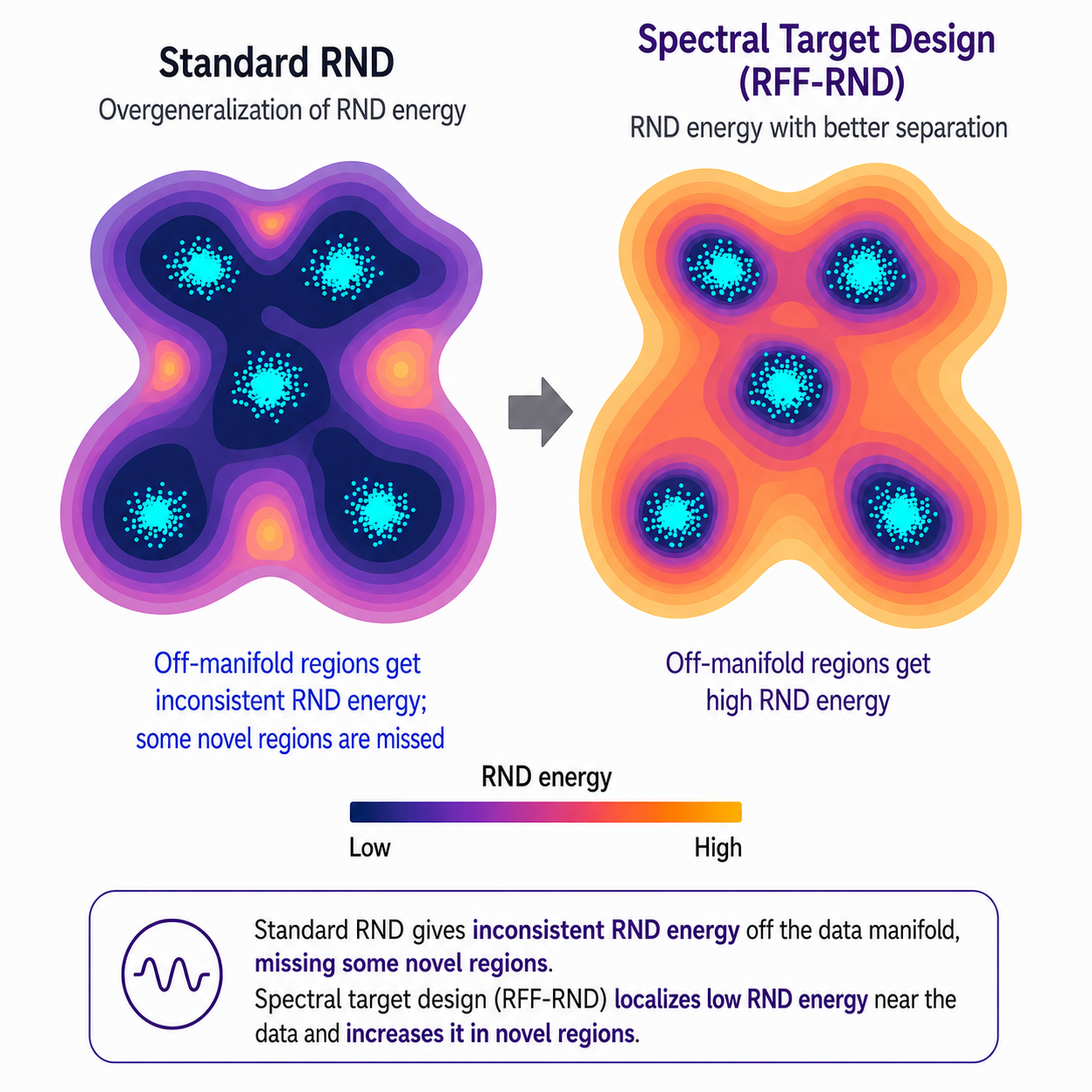
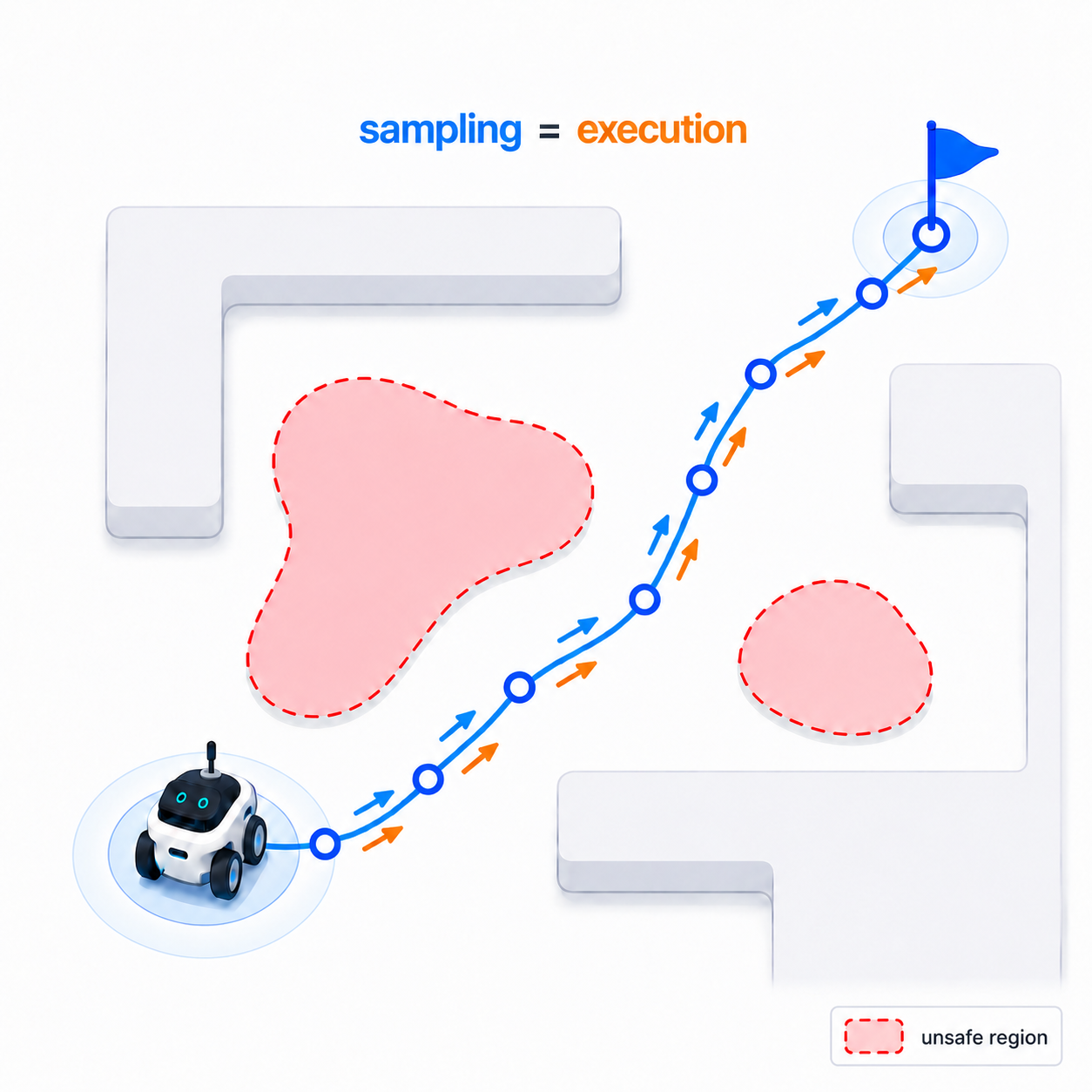 Safe Streaming Flow Planning by Aligning Sampling Dynamics with Execution DynamicsMay. 2026. (submitted).
Safe Streaming Flow Planning by Aligning Sampling Dynamics with Execution DynamicsMay. 2026. (submitted). In The Fourteenth International Conference on Learning Representations (ICLR), Jan. 2026.
In The Fourteenth International Conference on Learning Representations (ICLR), Jan. 2026. Random Fourier Features Lifted Physics-Informed Koopman NetworkIn Proceedings of the Korean Society for Aeronautical & Space Sciences (KSAS), Nov. 2025. (in Korean).
Random Fourier Features Lifted Physics-Informed Koopman NetworkIn Proceedings of the Korean Society for Aeronautical & Space Sciences (KSAS), Nov. 2025. (in Korean).